PORTFOLIO
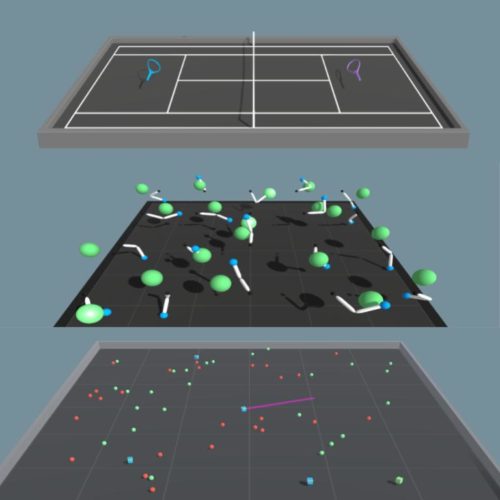
Deep Reinforcement Learning based control of complex robotic agents
Details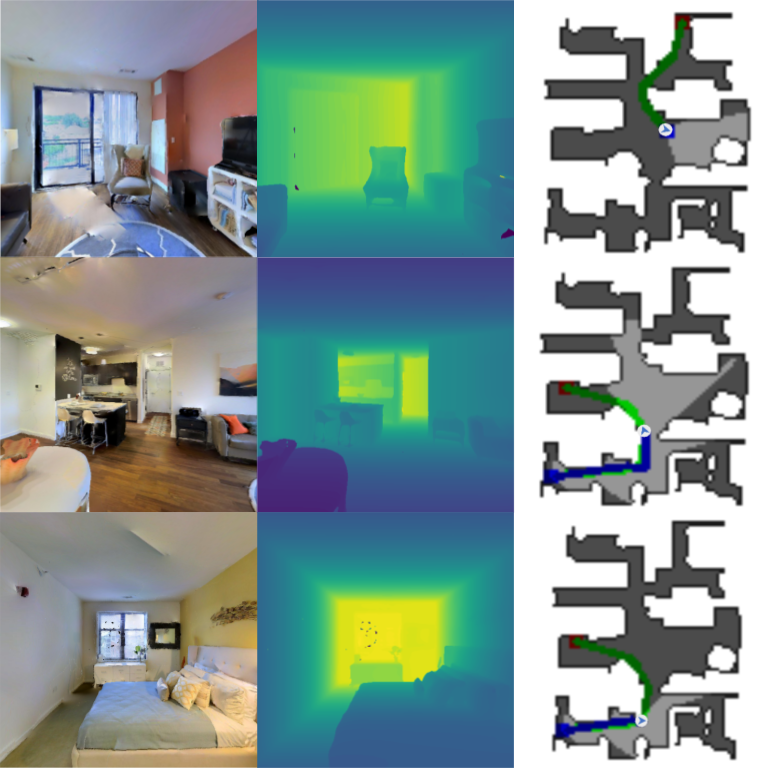
Embodied Visual Navigation in Habitat
Details
Learning inverse dynamics of 7-DOF Robot Arm
Details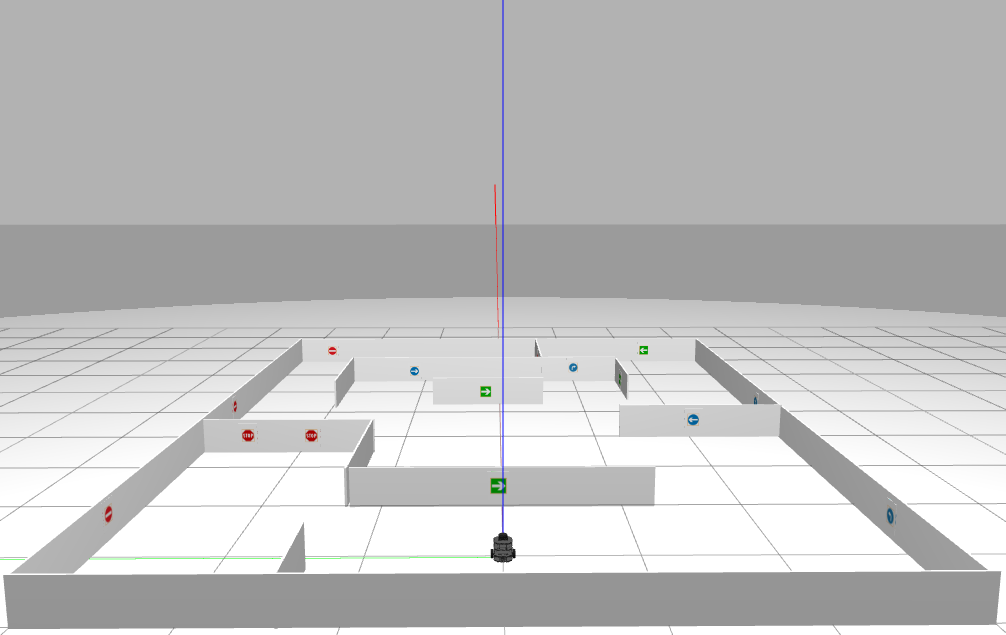
Complex robot maze navigation using image classification and ROS
Details
Vehicle Control for Autonomous Driving
Details
Environment perception stack for Self Driving Cars
Details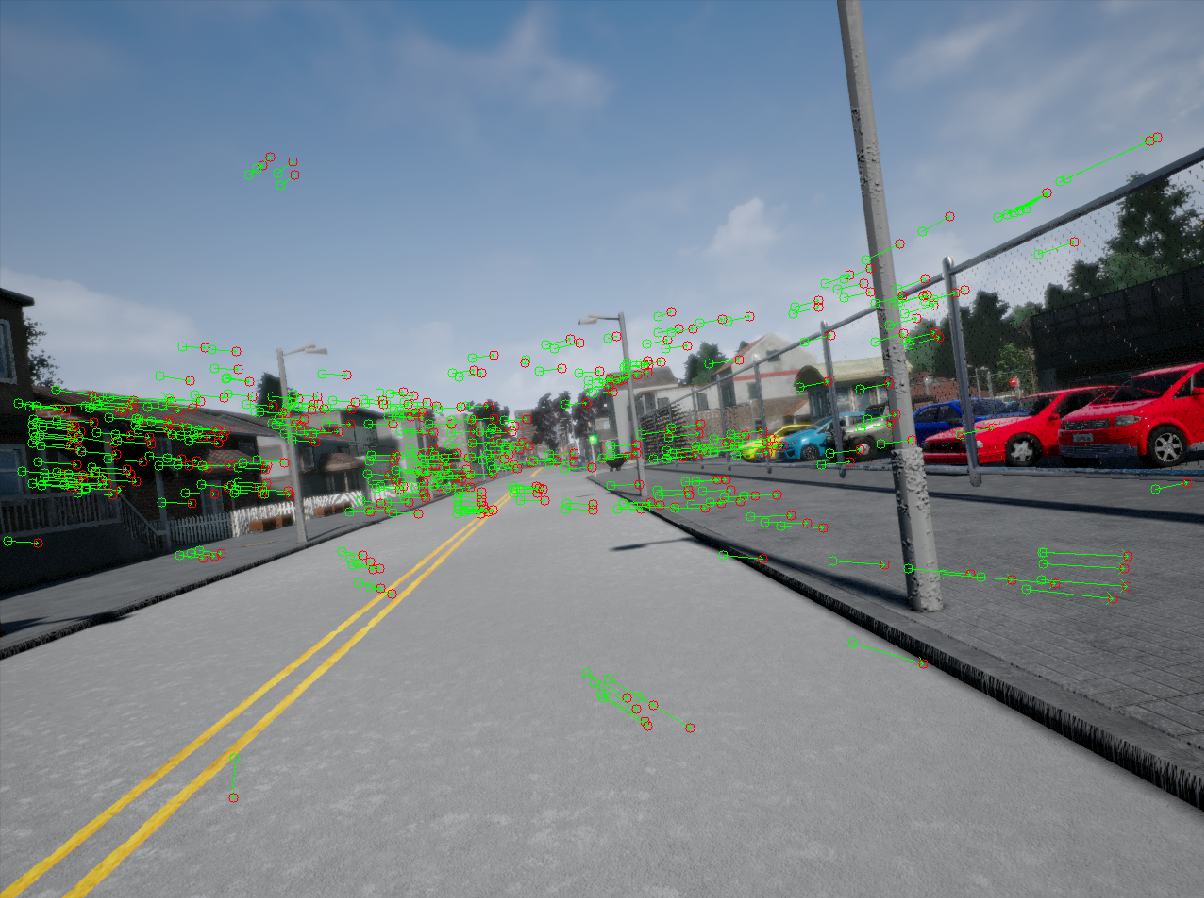
Visual Odometry for Autonomous Driving
Details