Project Description
A set of 52 images taken from the camera mounted on the car were used to estimate the vehicle trajectory over time.
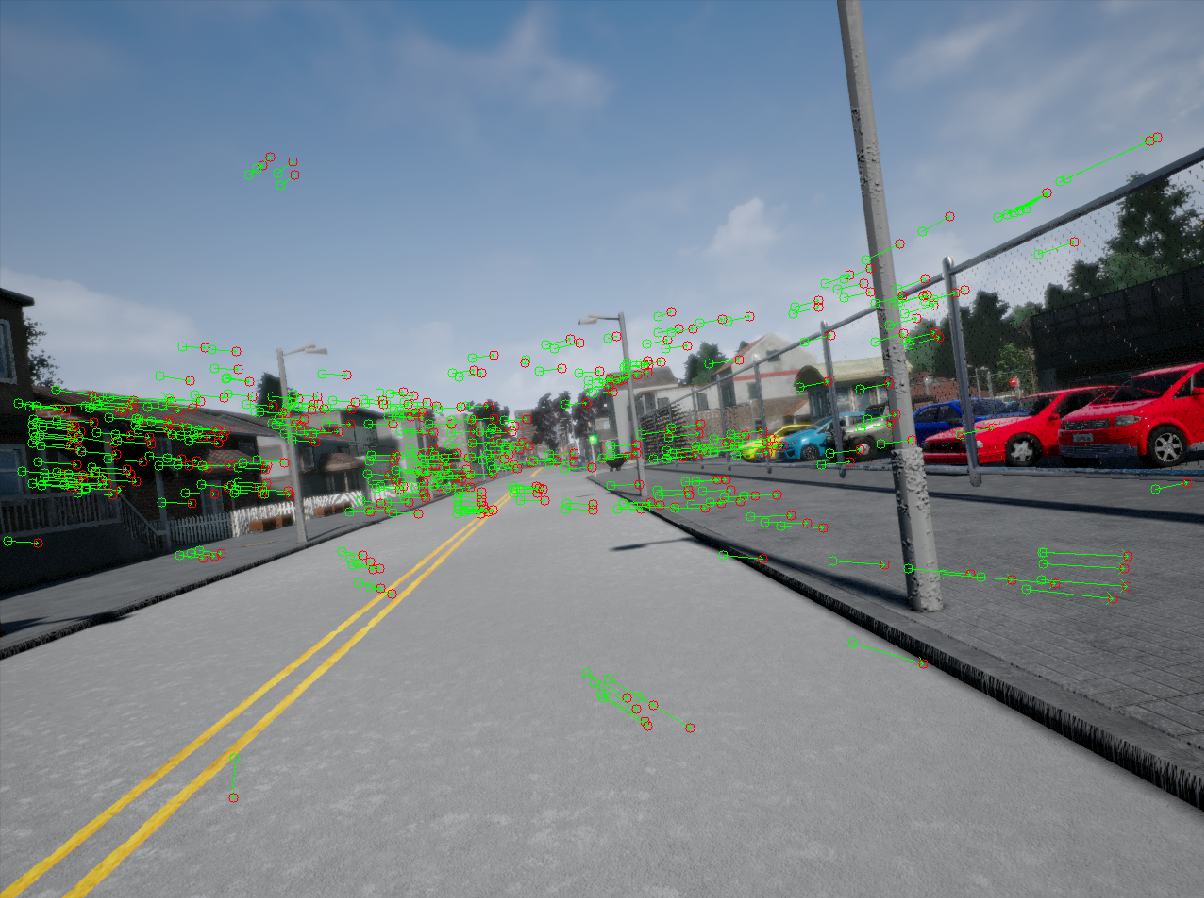
- Feature Matching: The first phase of the project constitutes finding features in the first image and matching them with the same features in the second image to locate how much the features have moved because of car motion. Below you can see the features in the first image in green and the subsequent matched feature in the second image in red. SIFT feature detector was used for detection and Flann based feature matching was used for feature matching.

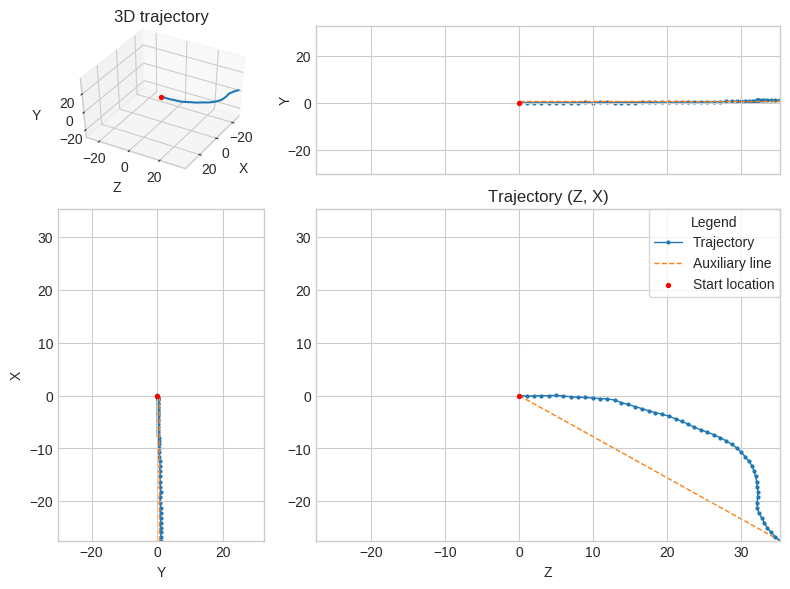
- Visual Odometry: Perspective n Point was implemented to estimate the rotation matrices from each feature in the first image to the subsequent matches feature in the second image. Estimated trajectory is presented in the image below: