Project Description
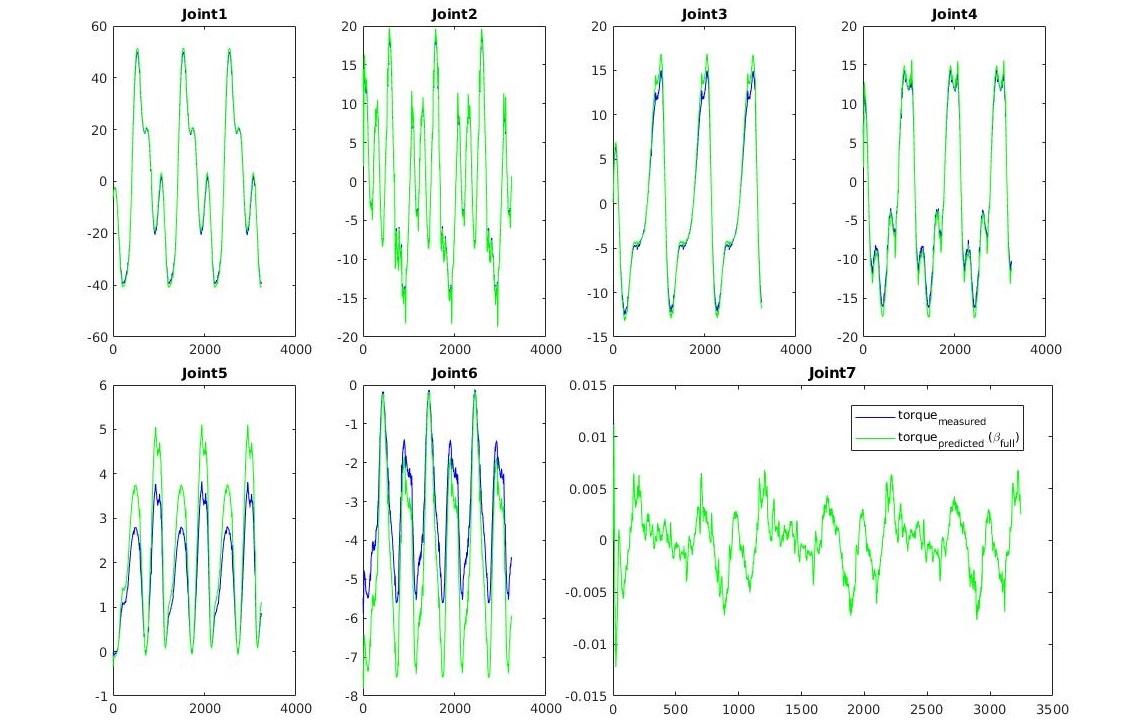
An accurate estimation for the inertial parameters of a robot manipulator is essential for many modern manipulator control algorithms including calculating inverse dynamics of the robot. This project implements a unique approach for numerically determining regressor matrix without explicitly deriving the equations. This is accomplished using state of the art articulated body algorithms such as Featherstone’s and an approximate model of the robot usually captured by a URDF file. The proposed approach is platform and model independent and results in a fast, error free methodology that is amenable to real-time control. The effectiveness of our method is demonstrated by applying it on a 7-DOF robot arm. Once the regressor matrix is obtained numerically, the data from real 7-DOF robotic arm was collected and all the parameters of the robot are estimated using linear least square estimation method. Accurate estimation of the robot parameters allows us to implement inverse dynamics on the robot by finding joint torques needed to accomplish a certain orientation of the robot. Torque estimation on unknown trajectories are presented in the figure below: