Project Description
Implementation of Longitudinal and Lateral control to autonomously navigate a car through a set of given way points using
Stanley Control for Lateral Control and
PID control for Longitudinal Control. This project was implemented on CARLA simulator based on unreal engine.
- Input to the system is given waypoints in the form of a text file which specifiy the desired position and velocity along the path
- Output is throttle_output (betwwen 0 and 1), steer output (between -1.22 and 1.22) and brake_output (between 0 and 1)
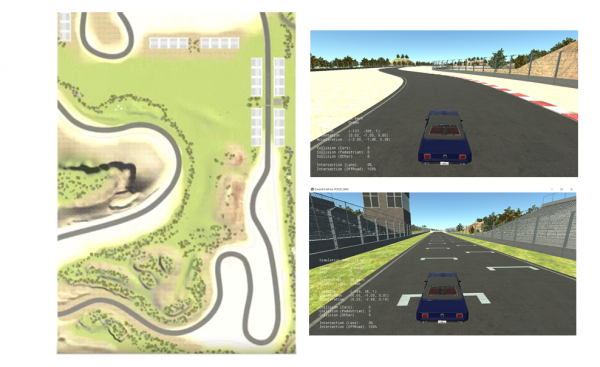
CARLA SIMULATION & RACETRACK:

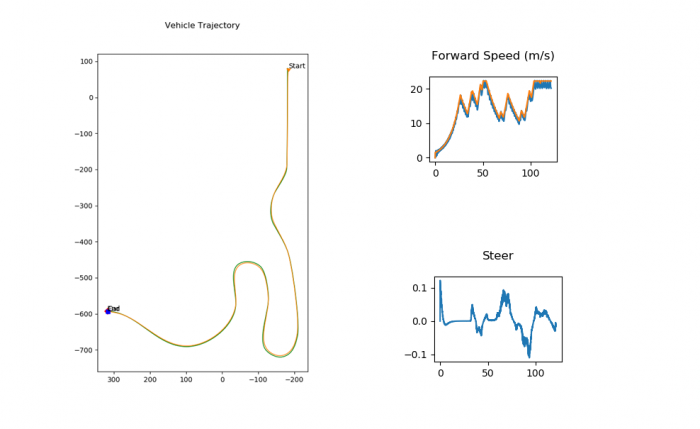
SOLUTION & RESULTS: