2026
3DV 2026
Oral PresentationFastMap: Revisiting Dense and Scalable Structure from Motion
@inproceedings{fastmap2025,
author = {Jiahao Li and Haochen Wang and Muhammad Zubair Irshad and Igor Vasiljevic and Matthew R. Walter and Vitor Campagnolo Guizilini and Greg Shakhnarovich},
title = {FastMap: Revisiting Structure from Motion through First-Order Optimization},
journal = {International Conference on 3D Vision (3DV)},
year = {2026}
}
arXiv 2025
PolaRiS: Scalable Real-to-Sim Evaluations for Generalist Robot Policies
@misc{polaris,
title = {PolaRiS: Scalable Real-to-Sim Evaluations for Generalist Robot Policies},
author = {Jain, Arhan and Zhang, Mingtong and Arora, Kanav and Chen, William and Torne, Marcel and Irshad, Muhammad Zubair and Zakharov, Sergey and Wang, Yue and Levine, Sergey and Finn, Chelsea and Ma, Wei-Chiu and Shah, Dhruv and Gupta, Abhishek and Pertsch, Karl},
year = {2025}
}
arXiv 2026
AnchorDream: Repurposing Video Diffusion for Embodiment-Aware Robot Data Synthesis
@misc{ye2025anchordream,
title={AnchorDream: Repurposing Video Diffusion for Embodiment-Aware Robot Data Synthesis},
author={Junjie Ye and Rong Xue and Basile Van Hoorick and Pavel Tokmakov and Muhammad Zubair Irshad and Yue Wang and Vitor Guizilini},
year={2025},
eprint={2512.11797},
archivePrefix={arXiv},
primaryClass={cs.RO}
}
2025
arXiv 2025
Press (IEEE Spectrum)A Careful Examination of Large Behavior Models for Multitask Dexterous Manipulation
*Primary contributors (listed first, alphabetical)
@article{lbmtri2025,
title={A Careful Examination of Large Behavior Models for Multitask Dexterous Manipulation},
author={TRI LBM Team and Jose Barreiros and Andrew Beaulieu and ...},
year={2025},
eprint={2507.05331},
archivePrefix={arXiv},
}
CVPR 2025
Zero-Shot Novel View and Depth Synthesis with Multi-View Geometric Diffusion
@misc{guizilini2025zeroshotnovelviewdepth,
title={Zero-Shot Novel View and Depth Synthesis with Multi-View Geometric Diffusion},
author={Vitor Guizilini and Muhammad Zubair Irshad and Dian Chen and Greg Shakhnarovich and Rares Ambrus},
year={2025},
eprint={2501.18804},
archivePrefix={arXiv},
primaryClass={cs.CV}
}
RSS 2024
Posed-DROID: Scaling-Up Automatic Camera Calibration for DROID dataset
Part of DROID paper
@misc{irshad2024scalingupcalibration,
title={Scaling-Up Automatic Camera Calibration for DROID Dataset: A study using Foundation models and Existing Deep-Learning tools},
author={Muhammad Zubair Irshad and Vitor Guizilini and Alexander Khazatsky and Karl Pertsch},
year={2024},
howpublished={\url{medium.com/p/4ddfc45361d3}},
note={Medium blog post}
}
CVPR 2025
ZeroGrasp: Zero-Shot Shape Reconstruction Enabled Robotic Grasping
@InProceedings{Iwase_CVPR_2025,
author = {Iwase, Shun and, Irshad, Muhammad Zubair and Liu, Katherine and Guizilini, Vitor and Lee, Robert and Ikeda, Takuya and Amma, Ayako and Nishiwaki, Koichi and Kitani, Kris and Ambrus, Rares and Zakharov, Sergey},
title = {ZeroGrasp: Zero-Shot Shape Reconstruction Enabled Robotic Grasping},
booktitle = {CVPR},
year = {2025}
}
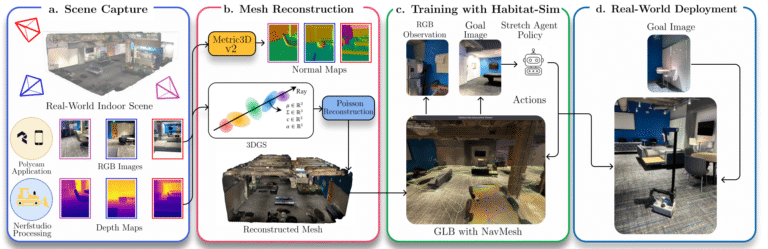
ICCV 2025 | EAI Workshop CVPR 2025
EmbodiedSplat: Personalized Real-to-Sim-to-Real Navigation with Gaussian Splats from a Mobile Device
@InProceedings{Chhablani_2025_ICCV,
author = {Chhablani, Gunjan and Ye, Xiaomeng and Irshad, Muhammad Zubair and Kira, Zsolt},
title = {EmbodiedSplat: Personalized Real-to-Sim-to-Real Navigation with Gaussian Splats from a Mobile Device},
booktitle = {Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV)},
month = {October},
year = {2025},
pages = {25431-25441}
}
ICCV 2025
SplArt: Articulation Estimation and Part-Level Reconstruction with 3D Gaussian Splatting
@InProceedings{Lin_2025_ICCV,
author = {Lin, Shengjie and Fang, Jiading and Irshad, Muhammad Zubair and Guizilini, Vitor Campagnolo and Ambrus, Rares Andrei and Shakhnarovich, Greg and Walter, Matthew R.},
title = {SplArt: Articulation Estimation and Part-Level Reconstruction with 3D Gaussian Splatting},
booktitle = {Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV)},
month = {October},
year = {2025},
pages = {8841-8851}
}
CoRL 2025
Oral PresentationReal2Render2Real: Scaling Robotic Manipulation Data Without Dynamics Simulation or Robot Hardware
@InProceedings{pmlr-v305-yu25a,
title = {Real2Render2Real: Scaling Robot Data Without Dynamics Simulation or Robot Hardware},
author = {Yu, Justin and Fu, Letian and Huang, Huang and El-Refai, Karim and Ambrus, Rares Andrei and Cheng, Richard and Irshad, Muhammad Zubair and Goldberg, Ken},
booktitle = {Proceedings of The 9th Conference on Robot Learning},
pages = {547--577},
year = {2025},
volume = {305},
series = {Proceedings of Machine Learning Research},
month = {27--30 Sep},
publisher = {PMLR},
url = {https://proceedings.mlr.press/v305/yu25a.html}
}
ICRA 2025
POGS: Persistent Object Gaussian Splat for Tracking Human and Robot Manipulation of Irregularly Shaped Objects
@article{yu2025pogs,
author = {Yu, Justin and Hari, Kush and El-Refai, Karim and Dalil, Arnav and Kerr, Justin and Kim, Chung-Min and Cheng, Richard and Irshad, Muhammad Zubair and Goldberg, Ken},
title = {Persistent Object Gaussian Splat (POGS) for Tracking Human and Robot Manipulation of Irregularly Shaped Objects},
journal = {Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)},
year = {2025},
}
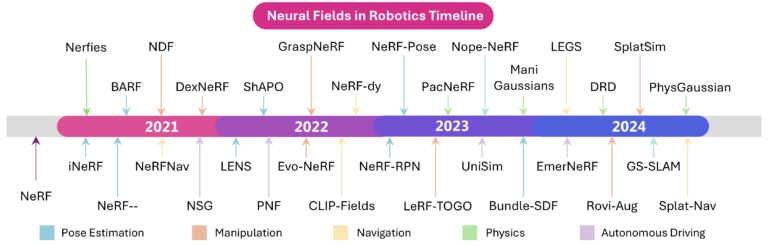
In Submission 2025
Neural Fields in Robotics: A Survey
@article{irshad2024neuralfieldsroboticssurvey,
title={Neural Fields in Robotics: A Survey},
author={Muhammad Zubair Irshad and Mauro Comi and Yen-Chen Lin and Nick Heppert and Abhinav Valada and Rares Ambrus and Zsolt Kira and Jonathan Tremblay},
journal={arXiv preprint arXiv:2410.20220},
year={2024}
}
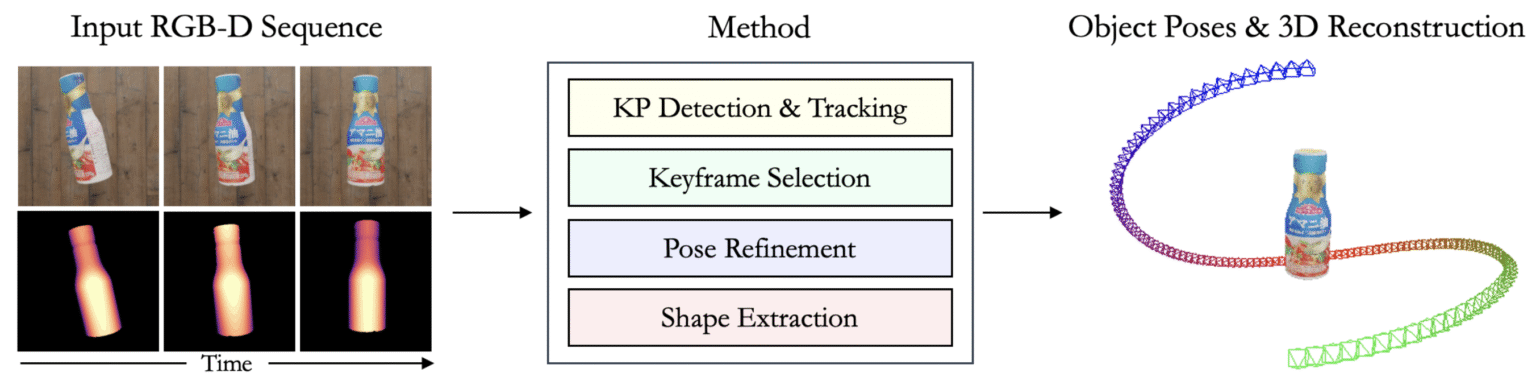
arXiv 2025
GTR: Gaussian Splatting Tracking and Reconstruction of Unknown Objects Based on Appearance and Geometric Complexity
Paper
BibTeX
@misc{ikeda2025gtr,
title={GTR: Gaussian Splatting Tracking and Reconstruction of Unknown Objects Based on Appearance and Geometric Complexity},
author={Takuya Ikeda and Sergey Zakharov and Muhammad Zubair Irshad and Istvan Balazs Opra and Shun Iwase and Dian Chen and Mark Tjersland and Robert Lee and Alexandre Dilly and Rares Ambrus and Koichi Nishiwaki},
year={2025},
eprint={2505.11905},
archivePrefix={arXiv},
primaryClass={cs.CV}
}
2024
ECCV 2024 | NRI Workshop CVPR 2024
NeRF-MAE: Masked AutoEncoders for Self-Supervised 3D Representation Learning for Neural Radiance Fields
@inproceedings{irshad2024nerfmae,
title={NeRF-MAE: Masked AutoEncoders for Self-Supervised 3D Representation Learning for Neural Radiance Fields},
author={Muhammad Zubair Irshad and Sergey Zakharov and Vitor Guizilini and Adrien Gaidon and Zsolt Kira and Rares Ambrus},
journal={European Conference on Computer Vision (ECCV)},
year={2024}
}
RSS 2024
DROID: A Large-Scale In-the-Wild Robot Manipulation Dataset
@article{khazatsky2024droid,
title = {DROID: A Large-Scale In-The-Wild Robot Manipulation Dataset},
author = {Alexander Khazatsky and Karl Pertsch and Suraj Nair and Ashwin Balakrishna and Sudeep Dasari and Siddharth Karamcheti and Soroush Nasiriany and Mohan Kumar Srirama and Lawrence Yunliang Chen and Kirsty Ellis and Peter David Fagan and Joey Hejna and Masha Itkina and Marion Lepert and Yecheng Jason Ma and Patrick Tree Miller and Jimmy Wu and Suneel Belkhale and Shivin Dass and Huy Ha and Arhan Jain and Abraham Lee and Youngwoon Lee and Marius Memmel and Sungjae Park and Ilija Radosavovic and Kaiyuan Wang and Albert Zhan and Kevin Black and Cheng Chi and Kyle Beltran Hatch and Shan Lin and Jingpei Lu and Jean Mercat and Abdul Rehman and Pannag R Sanketi and Archit Sharma and Cody Simpson and Quan Vuong and Homer Rich Walke and Blake Wulfe and Ted Xiao and Jonathan Heewon Yang and Arefeh Yavary and Tony Z. Zhao and Christopher Agia and Rohan Baijal and Mateo Guaman Castro and Daphne Chen and Qiuyu Chen and Trinity Chung and Jaimyn Drake and Ethan Paul Foster and Jensen Gao and Vitor Guizilini and David Antonio Herrera and Minho Heo and Kyle Hsu and Jiaheng Hu and Muhammad Zubair Irshad and Donovon Jackson and Charlotte Le and Yunshuang Li and Kevin Lin and Roy Lin and Zehan Ma and Abhiram Maddukuri and Suvir Mirchandani and Daniel Morton and Tony Nguyen and Abigail O'Neill and Rosario Scalise and Derick Seale and Victor Son and Stephen Tian and Emi Tran and Andrew E. Wang and Yilin Wu and Annie Xie and Jingyun Yang and Patrick Yin and Yunchu Zhang and Osbert Bastani and Glen Berseth and Jeannette Bohg and Ken Goldberg and Abhinav Gupta and Abhishek Gupta and Dinesh Jayaraman and Joseph J Lim and Jitendra Malik and Roberto MartÃn-MartÃn and Subramanian Ramamoorthy and Dorsa Sadigh and Shuran Song and Jiajun Wu and Michael C. Yip and Yuke Zhu and Thomas Kollar and Sergey Levine and Chelsea Finn},
year = {2024},
}
CoRL 2024
Oral Presentation (Top 4.3%)RoVi-Aug: Robot and Viewpoint Augmentation for Cross-Embodiment Robot Learning
@inproceedings{chen2024roviaug,
title={RoVi-Aug: Robot and Viewpoint Augmentation for Cross-Embodiment Robot Learning},
author={Lawrence Yunliang Chen and Chenfeng Xu and Karthik Dharmarajan and Zubair Irshad and Richard Cheng and Kurt Keutzer and Masayoshi Tomizuka and Quan Vuong and Ken Goldberg},
booktitle = {Conference on Robot Learning (CoRL)},
address = {Munich, Germany},
year = {2024},
}
IROS 2024
Language-Embedded Gaussian Splats (LEGS): Incrementally Building Room-Scale Representations with a Mobile Robot
@inproceedings{yu2024legs,
title={Language-Embedded Gaussian Splats (LEGS): Incrementally Building Room-Scale Representations with a Mobile Robot},
author={Justin Yu and Kush Hari and Kishore Srinivas and Karim El-Refai and Adam Rashid and Chung Min Kim and Justin Kerr1 and Richard Cheng and Muhammad Zubair Irshad and Ashwin Balakrishna and Thomas Kollar and Ken Goldberg},
booktitle={Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS)},
year={2024}
}
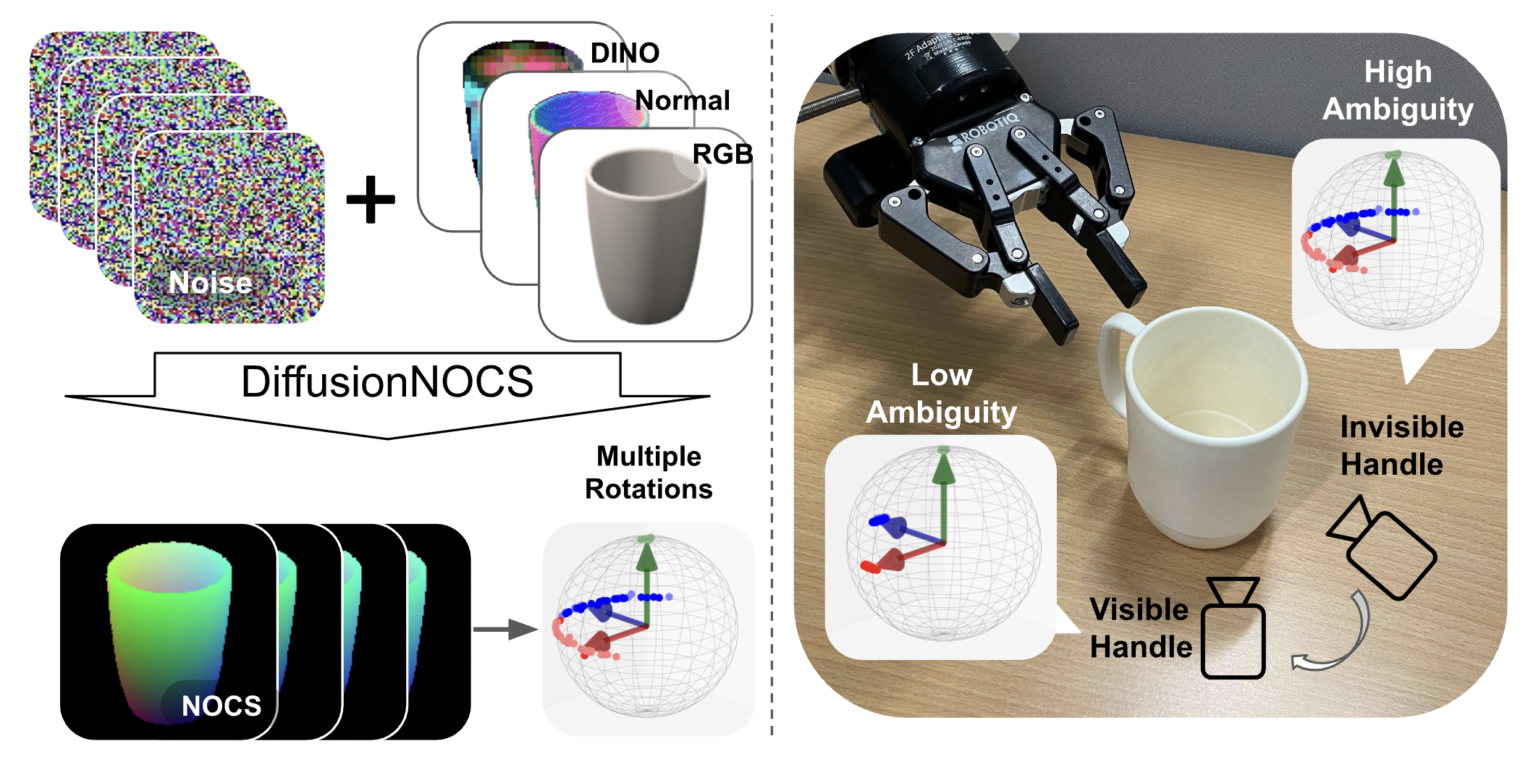
IROS 2024 | R6D Workshop ECCV 2024
DiffusionNOCS: Managing Symmetry and Uncertainty in Sim2Real Multi-Modal Category-level Pose Estimation
@inproceedings{ikeda2024diffusionnocs,
title={DiffusionNOCS: Managing Symmetry and Uncertainty in Sim2Real Multi-Modal Category-level Pose Estimation},
author={Takuya Ikeda and Sergey Zakharov and Tianyi Ko and Muhammad Zubair Irshad and Robert Lee and Katherine Liu and Rares Ambrus and Koichi Nishiwaki},
booktitle={Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS)},
year={2024}
}
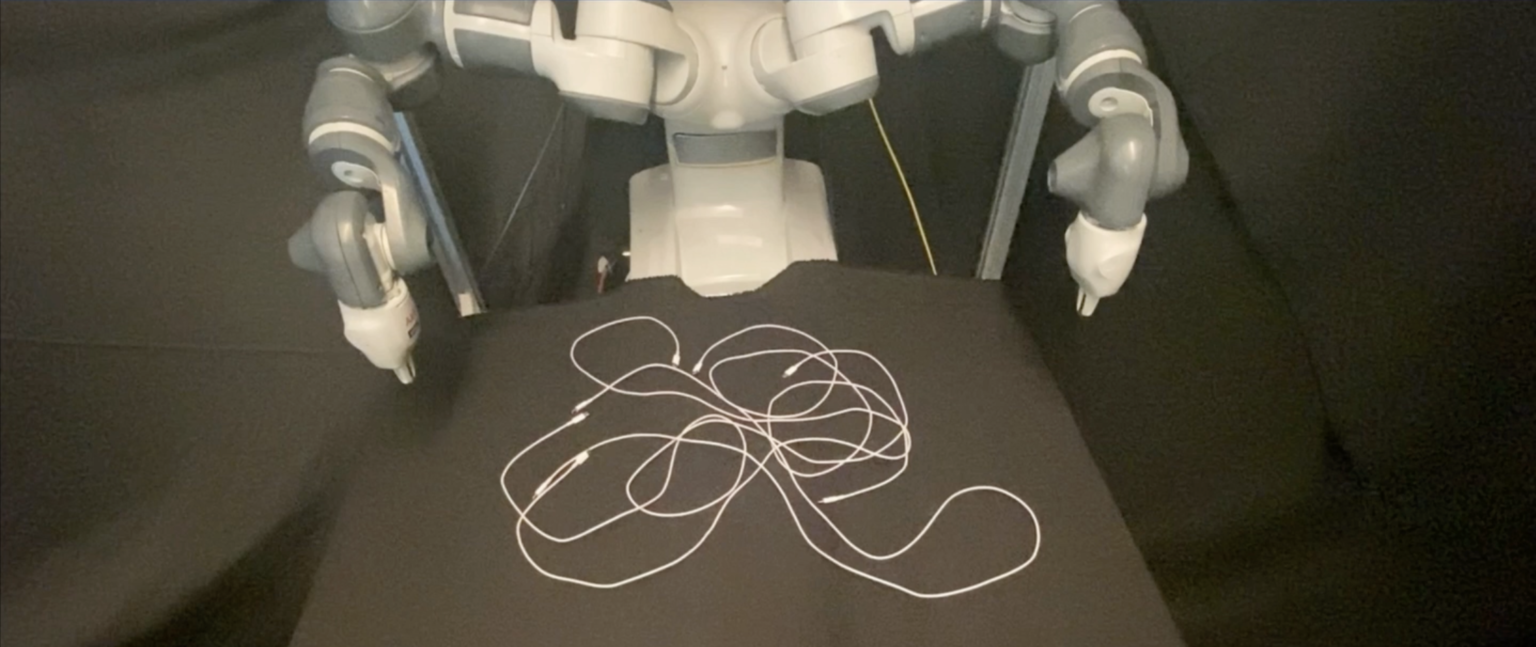
IROS 2024
MANIP: A Modular Architecture for Integrating Interactive Perception for Robot Manipulation
@inproceedings{yu2024manip,
title={MANIP: A Modular Architecture for Integrating Interactive Perception for Robot Manipulation},
author={Justin Yu and Tara Sadjadpour and Abby O'Neill and Mehdi Khfifi and Lawrence Yunliang Chen and Richard Cheng and Muhammad Zubair Irshad and Ashwin Balakrishna and Thomas Kollar and Ken Goldberg},
booktitle={Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS)},
year={2024}
}
ICRA 2024
Best Paper AwardOpen X‑Embodiment: Robotic Learning Datasets and RT‑X Models
@misc{open_x_embodiment_rt_x_2023,
title={Open {X-E}mbodiment: Robotic Learning Datasets and {RT-X} Models},
author = {Open X-Embodiment Collaboration and Abby O'Neill and Abdul Rehman and Abhinav Gupta and ... and Muhammad Zubair Irshad and ... et al.},
howpublished = {\url{https://arxiv.org/abs/2310.08864}},
year = {2023},
}
AICC Workshop CVPR 2024
ICE-G: Image Conditional Editing of 3D Gaussian Splats
@misc{jaganathan2024iceg,
title={ICE-G: Image Conditional Editing of 3D Gaussian Splats},
author={Vishnu Jaganathan and Hannah Hanyun Huang and Muhammad Zubair Irshad and Varun Jampani and Amit Raj and Zsolt Kira},
year={2024},
eprint={2406.08488},
archivePrefix={arXiv},
primaryClass={cs.CV}
}
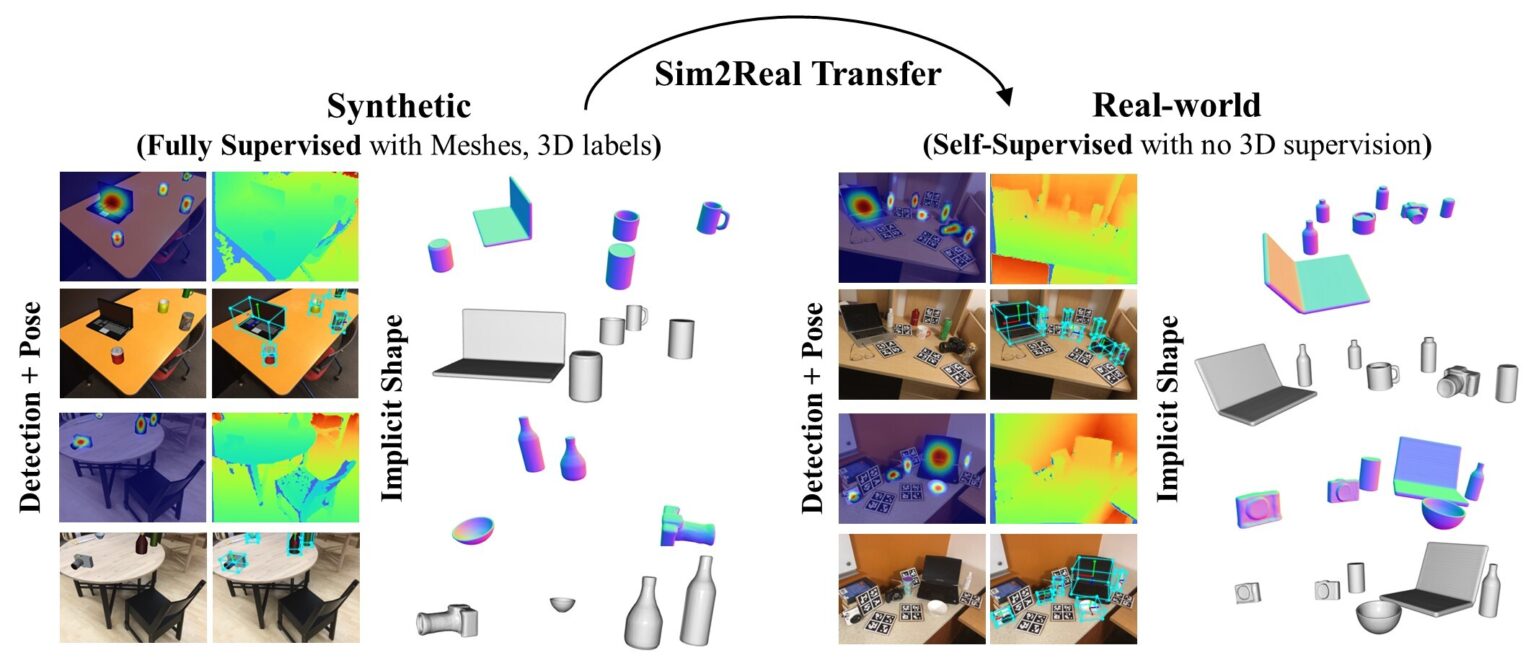
ICRA 2024
FSD: Fast Self-Supervised Single RGB-D to Categorical 3D Objects
@inproceedings{lunayach2023fsd,
title={FSD: Fast Self-Supervised Single RGB-D to Categorical 3D Objects},
author={Mayank Lunayach and Sergey Zakharov and Dian Chen and Rares Ambrus and Zsolt Kira and Muhammad Zubair Irshad},
booktitle={International Conference on Robotics and Automation},
organization={IEEE},
year={2024}
}
2023
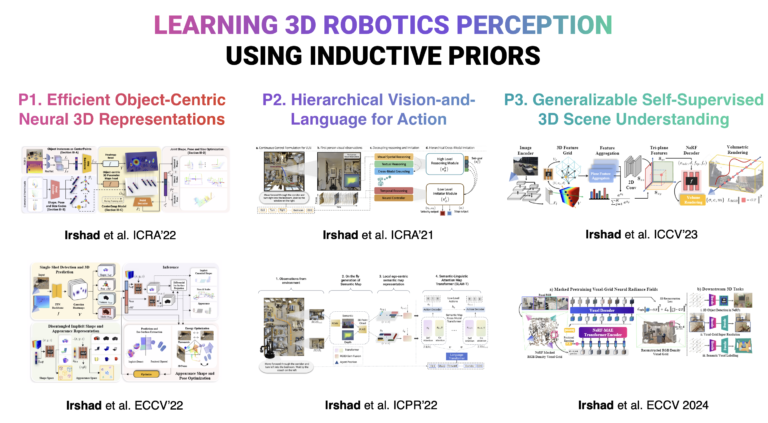
PhD Thesis 2023
Learning 3D Robotics Perception using Inductive Priors
Georgia Institute of Technology
@misc{irshad2024learning3droboticsperception,
title={Learning 3D Robotics Perception using Inductive Priors},
author={Muhammad Zubair Irshad},
year={2024},
eprint={2405.20364},
archivePrefix={arXiv},
primaryClass={cs.CV},
url={https://arxiv.org/abs/2405.20364},
}
ICCV 2023
NeO 360: Neural Fields for Sparse View Synthesis of Outdoor Scenes
@inproceedings{irshad2023neo360,
title={NeO 360: Neural Fields for Sparse View Synthesis of Outdoor Scenes},
author={Muhammad Zubair Irshad and Sergey Zakharov and Katherine Liu and Vitor Guizilini and Thomas Kollar and Adrien Gaidon and Zsolt Kira and Rares Ambrus},
journal={International Conference on Computer Vision (ICCV)},
year={2023},
}
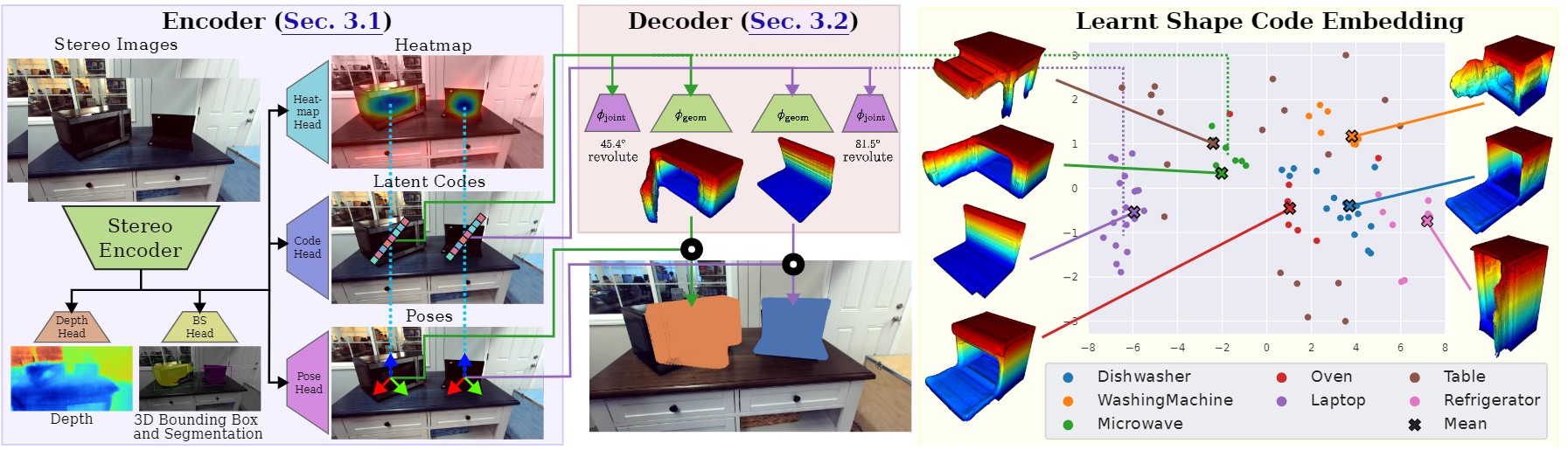
CVPR 2023
CARTO: Category and Join Agnostic Reconstruction of Articulated Objects
@inproceedings{heppert2023carto,
title={Carto: Category and joint agnostic reconstruction of articulated objects},
author={Heppert, Nick and Irshad, Muhammad Zubair and Zakharov, Sergey and Liu, Katherine and Ambrus, Rares Andrei and Bohg, Jeannette and Valada, Abhinav and Kollar, Thomas},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
pages={21201--21210},
year={2023}
}
2022
ECCV 2022
ShAPO: Implicit Representations for Multi-Object Shape, Appearance, and Pose Optimization
@inproceedings{irshad2022shapo,
title = {ShAPO: Implicit Representations for Multi-Object Shape Appearance and Pose Optimization},
author = {Muhammad Zubair Irshad and Sergey Zakharov and Rares Ambrus and Thomas Kollar and Zsolt Kira and Adrien Gaidon},
journal = {European Conference on Computer Vision (ECCV)},
year = {2022}
}
ICRA 2022
CenterSnap: Single-Shot Multi-Object 3D Shape Reconstruction and Categorical 6D Pose and Size Estimation
@inproceedings{irshad2022centersnap,
title = {CenterSnap: Single-Shot Multi-Object 3D Shape Reconstruction and Categorical 6D Pose and Size Estimation},
author = {Muhammad Zubair Irshad and Thomas Kollar and Michael Laskey and Kevin Stone and Zsolt Kira},
journal = {IEEE International Conference on Robotics and Automation (ICRA)},
year = {2022}
}
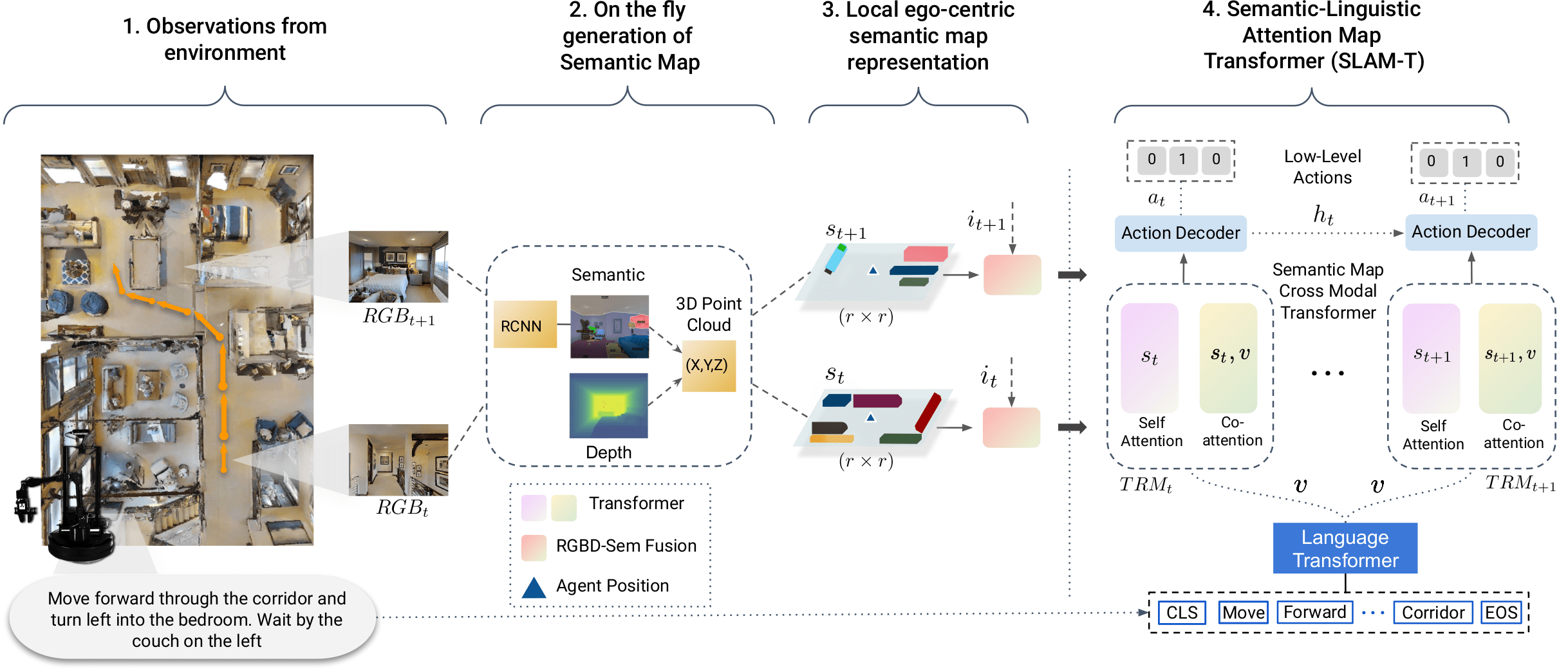
ICPR 2022
SASRA: Semantically-aware Spatio-Temporal Reasoning Agent for Vision-and-Language Navigation
@INPROCEEDINGS{irshad2022sasra,
author={Irshad, Muhammad Zubair and Chowdhury Mithun, Niluthpol and Seymour, Zachary and Chiu, Han-Pang and Samarasekera, Supun and Kumar, Rakesh},
booktitle={2022 26th International Conference on Pattern Recognition (ICPR)},
title={Semantically-aware Spatio-temporal Reasoning Agent for Vision-and-Language Navigation in Continuous Environments},
year={2022},
pages={4065-4071},
doi={10.1109/ICPR56361.2022.9956561}
}
2021
ICRA 2021
Hierarchical Cross-Modal Agent for Robotics Vision-and-Language Navigation
@inproceedings{irshad2021hierarchical,
title={Hierarchical Cross-Modal Agent for Robotics Vision-and-Language Navigation},
author={Muhammad Zubair Irshad and Chih-Yao Ma and Zsolt Kira},
booktitle={Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)},
year={2021}
}